Mobile Manipulator Simulation
Mobile Manipulation / CoppeliaSim / PI Control
As the capstone for the Robotic Manipulation course, I created a software package to direct a Kuka YouBot to pick up and move a block in CoppeliaSim. This required first generating a trajectory for the end effector to reach the initial and final block locations, with intermediate stand-off and gripping poses, and then using inverse kinematics to determine the arm and chassis configurations. Additionally, I implemented a proportional integral controller to help correct for deviation from the planned trajectory.
Controller Tuning
Best performance: Kp = 3, Ki = 0
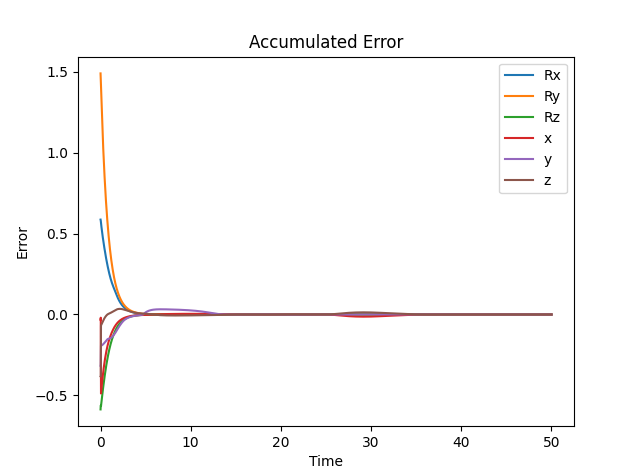
For the best performance, I chose a proportional gain of 3 and an integral gain of 0.
Initial Overshoot: Kp = 3, Ki = 4
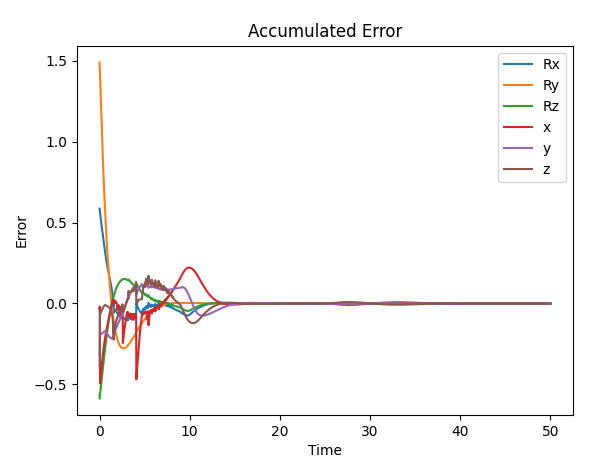
To simulate an initial overshoot, I chose a proportional gain of 3 and an integral gain of 4.
https://github.com/algarv/Mobile_Manipulation